

产品中心
PRODUCT

1.8 米 S 频段机动飞行器遥测接收系统
 18917114680
18917114680
1 概述
本系统主要完成飞行器跟踪与遥测接收,该系统设计简明精炼,系统功能 齐全,稳定可靠,方便机动,便于携带。
2 系统功能及战术技术性能指标
2. 1 系统功能
a. 具有接收、解调 PCM-FM 或 PCM-CDMA-BPSK 体制遥测信号能力;
b. 具备对外实时数据交互功能,能够实时向中心传输遥测数据、工作状 态等信息,并接收中心传送的 T0 、数引等信息。
c. 具有手动跟踪、扫描搜索、 自动跟踪、程序跟踪、记忆跟踪、数字引 导功能,并可实时输出跟踪角度信息;
d. 对 PCM-FM 遥测信号具有 MSD+TPC 解调译码能力;
e. 通过监控分系统实现对全系统的监控管理、参数设置、参数巡检;
f. 具备事后对外传输遥测数据的能力;
2.2 系统战术技术性能指标
a. 系统品质因数:
G/T≥3.5+20lg(f/f0 )dB/K(f0=2250.5MHz ,E≥5°) ;
b. 工作频段和点频: 2200MHz~2400MHz ,步进 0. 1MHz;
c. 天线口径: 1.8m;
d. 调制体制: PCM-FM ,PCM-CDMA-BPSK;
e. 极化方式:
1) PCM-FM 信号: 左、右旋极化合成;
2) PCM-CDMA-BPSK 信号: 左右旋接收;
f. 码速率范围:
1) PCM-FM:10kbit/s~2Mbit/s ,步长: 1bit/s;
2) PCM-CDMA-BPSK:1kbit/s~64kbit/s ,步长: 1bit/s;伪码码率 1Mchip/s~10Mchip/s;
g. 系统灵敏度(折算到 LNA 前端) :
1) PCM-FM:
Prmin ≤- 135dBW(Rb=2Mbit/s ,Bi=3.3MHz ,Pe=1×10-4, mf=0.7 ,MSD+TPC);
h. 自跟踪精度: 0.4![]() ;
;
i. 跟踪灵敏度:
1) PCM-FM:优于遥测解调灵敏度 3dB;
j. 防雷要求: 设备具备在无避雷塔条件下的自身防雷功能;
k. 系统可靠性;
1) MTBF: ≥120h;
2) MTTR:≤30min;
3) 连续工作时间: ≥8h;
l. 使用寿命: ≥15a。
2.3 使用要求
2.3. 1 供电条件
a. 电压: 220×(1±10%)V 或 380×(1±10%)V;
b. 频率: 50±2Hz。
2.3.2 环境条件
a. 存放温度: - 15ºC~+50ºC;
b. 相对湿度: 20%~95%(25℃) ;
c. 风速: 6 级风时正常工作,12 级风不破坏。
3 系统总体设计
3. 1 系统总体设计思想
3. 1. 1 信号电平动态范围设计
合理设计接收信道,既可以满足系统的远距离跟踪测量的要求,又可适 应近距离的跟踪测量。
3. 1.2 可靠的监控手段
为了让用户随时了解全系统设备情况,方便、快捷地对设备进行监控, 在系统的设计中为设备设置了完备的监控手段。通过监控分系统能够完成设 备远程操控。
3.2 系统组成
S频段遥测系统由天伺馈分系统、信道分系统、基带分系统、监控分系 统、时频分系统、测试标校分系统、数据交互分系统等组成。
3.2. 1 天伺馈分系统
天馈部分包括 1.8m 抛物面天线、S 频段馈源,采用单通道单脉冲跟踪体 制。
伺服部分包括天线座、天线驱动单元、天线控制单元、轴角编码器等部
![]() 。
。
3.2.2 信道分系统
信道分系统由四个 S 频段低噪声放大器、四台 S 频段下变频器组合、一 台上变频器等组成。能完成一个点频 S 频段左右旋射频信号的跟踪接收,将 射频信号下变频至 70MHz 中频信号,送基带分系统。
3.2.3 基带分系统
基带分系统完成中频遥测信号的接收、解调、角误差信号提取; 具备遥 测模拟测试等功能,具备遥测信号数据存储功能。
3.2.4 监控分系统
监控分系统由系统监控计算机和各分系统监控单元组成,完成该系统所
有设备的监控。
3.2.5 时频分系统
时频分系统包含一台时码器和一台 GPS/北斗授时仪。
时码器可接收解调/转发 IRIG-B 码,具有 GPS 和北斗授时功能,为系统 提供时间信息。
3.2.6 测试标校分系统
测试标校分系统由遥测基带组合内的遥测模拟源和一台 S 频段上变频器 组成,能产生遥测射频校验信号、中频校验信号,实现遥测射频闭环自检和 中频自检。
3.3 系统工作原理
系统工作原理框图见图1。

图 1 系统工作原理框图
3.3. 1 工作过程
当飞行器上辐射 出射频信号 时 ,天线一旦捕获 到PCM-FM或PCM- CDMA-BPSK遥测信号后即进入跟踪状态,将包含遥测信号及跟踪角误差信 息的左、右旋两路信号,经安装在天线馈源内的低噪声放大器放大后送S频 段下变频器,经混频、滤波、放大后,输出70MHz 中频信号送基带分系统, 遥测基带接收处理平台完成中频滤波放大、增益控制、分集合成、信道译码 处理、解调、数据存盘、数据处理、数据输出等,将解调出的角误差信号及 接收机有关信息送天线控制单元,伺服分系统完成对目标的自动跟踪。伺服 分系统是具有速度环和位置环的双环路控制系统,它根据遥测基带给出的跟 踪误差信号,与天线指向角信号相比较产生的误差信号,经过变换、数字处 理、放大、驱动天线指向预定目标。
监控计算机通过网络与各分系统连接,实现对各分系统的工作参数设 置、状态显示和监控管理功能。
数据交互计算机通过网络与遥测基带组合相连,对接收的遥测数据进行 显示及数据处理; 通过网络实时向中心传输测量数据、工作状态等信息。并 接收中心传来的T0和数字引导等信息,转发给伺服分系统。另外数据交互计 算机中可以安装有运管代理模块,具有支持运行管理; 并预留安全认证所需 的硬件接口,支持安全认证功能。
时码器可接收解调时统站送来的IRIG-B(AC)码或IRIG-B(DC)码,或者利 用GPS授时功能,也可产生内时统,输出多路B000时码信号供基带、伺服分 系统、检前记录器等设备使用,统一系统时间信息。
3.3.2 系统标校
系统标校时,将标校板放置于标校塔或者高处,要求遥测地面站天线与 标校板距离R≥2D2/λ,仰角φ≥3θ0.5 ,天线与标校板通视无遮挡。通过安装在天线座上标校望远镜、信标机、标校板,由跟踪接收机和天伺馈分系统完成 系统标校。
3.3.3 系统自检
遥测基带组合中的宽带调制处理平台可产生 70MHz 的调制信号, 自闭 环实现中频自检,或经 S 频段上变频器产生射频校验信号送射频分路组合, 耦合分路后可送 S 频段下变频器,再经遥测基带实现对遥测系统的射频闭环 自检。也可通过安装在天线抛物面上的校验天线完成射频无线自检。
4 系统接口设计
4. 1 系统对外接口
4. 1. 1 外时统接口
时频分系统接收外时统信号。
a. IRIG-B(AC)码
1) 幅度: 0.5~10V(Vp-p),双端平衡输入;
2) 调制比: 2:1~6:1;
3) 阻抗: 600Ω。
b. IRIG-B(DC)码
1) 接口电平: RS-422A;
2) 路数: 1 路。
c. GPS/北斗授时射频接口
1) N 型插座。
2) 路数: 2 路。
4. 1.2 数据交互接口
系统与外部的数据交互通过数据交互分系统完成。
a. 3 路,用于传输相同的数据,互为备份;
b. 采用网络接口;
c. 连接器:RJ45;
d. 接口速率:1000Mbps;
e. 物理层、数据链路层协议: 满足 IEEE802.3 规范;
f. 高层协议: 实时数据传输使用 PDXP/UDP/IP 协议,文件传输使用FEP/TCP/IP 协议(光纤链路)和PEF+RECP/UDP/IP 协议(卫通) 。
4.2 系统内部接口
4.2. 1 天伺馈分系统
4.2.1.1 与信道分系统接口
a. S 频段射频信号
1) 路数:2 路;
2) 接插件型号:N 型。
b. 基准信号
1) 路数:2 路(方位俯仰各一路) ;
2) 信号电平:RS-422A 电平。
4.2.1.2 与基带分系统接口
角误差信号包括:
a. 角误差(方位、俯仰各一路) 信号为模拟信号: 信号电平-5~+5V, 匹配阻抗为 600Ω;
b. AGC 电压为模拟信号,信号电平 0~5V;匹配阻抗为 600Ω;
c. 接收机锁定指示(LOCK):信号电平为 TTL 电平,0 为失锁、1 为 锁定;
d. 定向灵敏度: 1V/度。
4.2.1.3 与时频分系统接口
时码信号: 1 路,B000(DC)码,信号电平为 RS-422A 电平。
4.2.1.4 与校验分系统接口
1) 射频信号;
2) 接口使用 N 型插座;
3) 接口数量: 1 个。
4.2.1.5 与监控分系统接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.1.6 与数据交互分系统接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.2 信道分系统
4.2.2.1 与天伺馈分系统接口
a. S 频段射频信号
1) 路数: 2 路;
2) 接插件型号: N 型。
b. 基准信号
1) 路数: 2 路(方位俯仰各一路) ;
2) 信号电平: RS-422A 电平。
4.2.2.2 与基带分系统接口
a. 中频信号输入 4 路(左右旋各 2 路)
1) 输入阻抗: 50![]() ;
;
2) 插座型式: BNC。
b. 1kHz 基准输入 4 路(方位、俯仰各 2 路)
1) 输入信号形式: 频率为 1kHz 的方波;
2) 电平: RS-422A;
3) 时序关系: 俯仰超前方位 90º;
4) 插座型式: DB-44ZK(与时码输入共用同一插座) 。
c. 中频校验信号输出 4 路
1) 匹配阻抗: 50![]() ;
;
2) 插座: BNC。
4.2.2.3 与测试标校分系统接口
a. 中频校验信号 1 路
1) 70MHz 信号;
2) 接口使用 BNC 型插座;
3) 接口数量: 1 个。
b. 射频校验信号
1) 射频信号入;
2) 接口使用 N 型插座;
3) 接口数量: 1 个。
4.2.2.4 与监控分系统接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.3 基带分系统
4.2.3.1 与天伺馈分系统
角误差信号包括:
a. 角误差(方位、俯仰各一路) 信号为模拟信号: 信号电平-5~+5V, 匹配阻抗为 600Ω;
b. AGC 电压为模拟信号,信号电平 0~5V;匹配阻抗为 600Ω;
c. 接收机锁定指示(LOCK):信号电平为 TTL 电平,0 为失锁、1 为 锁定;
d. 定向灵敏度: 1V/度。
4.2.3.2 与信道分系统接口
a. 中频信号 4 路(左右旋各 2 路)
1) 输入阻抗: 50![]() ;
;
2) 插座型式: BNC。
b. 1kHz 基准 4 路(方位、俯仰各 2 路)
1) 输入信号形式: 频率为 1kHz 的方波;
2) 电平: RS-422A;
3) 时序关系: 俯仰超前方位 90º;
4) 插座型式: DB-44ZK(与时码输入共用同一插座) 。
c. 中频校验信号输出 4 路
1) 匹配阻抗: 50![]() ;
;
2) 插座: BNC。
4.2.3.3 与时频分系统接口
时码信号: 4 路,B000(DC)码,信号电平为 RS-422A 电平。
4.2.3.4 与监控分系统接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.3.5 与数据交互分系统接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.4 监控分系统
4.2.4.1 与天伺馈分系统接口
网络接口:1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.4.2 与信道分系统接口
网络接口:4 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.4.3 与基带分系统接口
网络接口: 3 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.4.4 与时频分系统接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.4.5 与测试标校分系统接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.4.6 与数据交互分系统接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.5 数据交互分系统
4.2.5.1 与天伺馈分系统接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.5.2 与基带分系统接口
网络接口: 3 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.5.3 与监控计算机接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.6 时频分系统
4.2.6.1 与天伺馈分系统接口
时码信号: 1 路,B000(DC)码,信号电平为 RS-422A 电平。
4.2.6.2 与基带分系统接口
时码信号: 3 路,B000(DC)码,信号电平为 RS-422A 电平。
4.2.6.3 与监控分系统接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
4.2.7 测试标校分系统
4.2.7.1 与天伺馈分系统接口
1) 射频信号 1 路;
2) 接口使用 N 型插座;
3) 接口数量: 1 个。
4.2.7.2 与信道分系统接口
a. 中频校验信号 1 路
1) 70MHz 信号;
2) 接口使用 BNC 型插座;
3) 接口数量: 1 个。
b. 射频校验信号
1) 射频信号路;
2) 接口使用 N 型插座;
3) 接口数量: 1 个。
4.2.7.3 与监控分系统接口
网络接口: 1 路,数据格式按接口文件执行,RJ-45 型插座。
5 分系统设计
5. 1 天伺馈分系统
5. 1. 1 主要功能
a. 采用单通道单脉冲跟踪体制实现对空间飞行目标的自动跟踪;
b. 接收数据交互分系统送来的 T0 、数字引导信息,完成数字引导;
c. 具备对数据交分系统送来的数据进行存储的功能;
d. 按照预先存储的理论弹道,完成程序跟踪;
e. 可以实现对天线的手动操控;
f. 接收左、右旋圆极化信号,送给信道分系统;
g. 把本分系统的工作状态和参数送监控分系统显示、存储;
h. 对天线的运转,具有电器保护措施和机械保护措施。
5. 1.2 主要技术指标
a. 天线增益: Gr≥28.5+20lg(f/f0 )dBi(f0=2250.5MHz ,E≥5°) ;
b. 波束宽度: θ1/2=4.8×(1±10%) °(f0=2250.5MHz );
c. 馈线损耗: ≤1.7dB(含滤波器损耗和耦合器功率分配损失) ;
d. 第一旁瓣电平: ≤- 14dB;
e. 极化形式: 左、右旋圆极化同时接收;
f. 圆极化轴比: AR≤1.2dB;
g. 天馈系统驻波比: VSWR≤1.5:1;
h. 差波束零深(和归一):≤-30dB;
i. 发阻滤波器带外(±75MHz )抑制: ≥40dB;
j. 能将实时跟踪角度数据、跟踪方式及状态进行存储,供事后打印分 析;
k. 跟踪误差显示方式: 数字显示、光标显示;
l. 天线工作方式:
1) 自动跟踪: 单通道单脉冲跟踪体制;
2) 手动跟踪: 用单杆进行手动控制跟踪;
3) 数字引导: 接收数据交互分系统送来的数字引导信息,对目标
进行跟踪;
4) 程序跟踪: 按照事先存储的理论弹道跟踪目标;
5) 记忆跟踪: 在丢失目标后,设备根据目标轨迹进行轨道推算, 根据推算结果进行记忆跟踪,记忆时间不少于 5s;
6) 扫描搜索: 速度可控制,可根据轨道预报自动控制天线实现对 目标的最佳捕获;
7) 收藏: 用制动器制动天线;
以上工作方式除收藏外,都能由天控单元微机按预置的优先级进行自动 选择跟踪(自选) ,或人工选定某一工作方式进行跟踪(手选) ;
m. 天线工作范围如表 1 所示:
表 1 天线工作范围
最大工作范围 | 保精度范围 | |||
A | E | A | E | |
角度( | ±355 | -3~90 | ±355 | 3~80 |
角速度(º/s) | 0~20 | 0~20 | 0.03~15 | 0.03~15 |
角加速度 (º/s2) | 0~10 | 0~10 | 0~5 | 0~5 |
n. 对天线的运转,要具有电气保护措施和机械保护措施。
5. 1.3 天馈部分
天馈部分由 1.8 米抛物面天线、S 频段馈源组成,均安装在天线座上。 可同时实现遥测信号接收、单通道单脉冲变换等多种功能。

图 2 1.8 米前馈天线示意图
5.1.3.1 五元阵照射器
S 频段馈源为一个五元阵照射器,采用半波振子按菱形排列组阵,上下两个单元天线经 180°桥输出 S 频段的俯仰误差信号。左右两个单元天线输出 方位误差信号。中间的单元天线置于抛物面反射器的焦点处,所以可获得最高的增益,即有最大的和信号,而四个对称的半波振子天线处于偏焦位置, 仅用于产生误差信号。为实现左、右旋圆极化,五元照射器内的所有单元天 线都设计成正交结构,经极化电桥形成左右旋信号。

图 3 S 频段馈源示意图
通过电磁仿真软件对 S 频段馈源的和、差方向图进行仿真计算可以得到 馈源辐射方向图,仿真结果如下图 4-7。

图 4 S 频段馈源和信号仿真方向图

图 5 S 频段馈源差信号仿真方向图

图 6 S 频段馈源回波损耗实际测试曲线

图 7 1.8 米 S 频段五元阵自跟踪天馈实物图
5.1.3.2 接收信道网络
接收信道网络中考虑到带外干扰的抑制,在形成单通道左、右旋信号
后,增加了滤波网络。
5.1.3.3 跟踪网络
天线的跟踪网络为单通道单脉冲体制的波束形成网络。其工作原理是按 一定阵形排列的四个单元天线与四个 90°桥形成八路左、右旋圆极化信号,经 四个 180°桥处理后分别形成左旋和右旋的俯仰和方位共四路误差信号,见图
8 。按旋向分开,方位和俯仰信号分别输入 0/π调制器,借助于二路外接的相 位差 90°的 1KHz 方波,实现对方位和俯仰二路误差信号的相位调制,被调 制的二路误差信号经相加器合并,再由一个定向耦合器迭加到和通道上,最终将三路信号(Σ 、ΔE 、ΔA)变成一路输出,即天线和差网络形成的和信号、方位误差信号、俯仰误差信号经过单通道变换器后形成单通道单脉冲信号。

图 8 单通道单脉冲信号的产生原理
5.1.3.4 馈源结构
S 频段馈源采用圆柱腔体密封结构,照射器、馈电网络、40dB 发阻滤波
器、低噪声放大器、连接电缆等安装在腔体内,根据研制方案评审会纪要的 要求,预留可以将 40dB 滤波器更换为 60dB 的空间。射频电缆插座均采用真 空密封插座,插座与腔体之间采用 O 型密封圈加硅橡胶密封。
5.1.3.5 天线辐射性能仿真
通过将五元阵结合天线面进行电磁仿真计算,可以精确得到天线的辐射 方向图,增益以及第一副瓣等特性,天线仿真结果如下图 9-11 所示。

图 9 S 频段和信号仿真方向图

图 10 S 频段差信号天线仿真方向图

图 11 S 频段五元阵差方向图实测结果
5.1.3.5.1 天线增益预估
天线总的增益主要包含: 天线仿真增益、面精度损耗、馈源损耗这几
项,所以结合以往工程经验对天线增益进行预估,预估结果见下表2所示。
表 2 天线增益预估
分类 | 2.2GHz |
仿真增益(dBi) | 30.0 |
面精度(dB) | 0.0 |
馈源损耗(dB) | 0.3 |
天线增益(dBi) | 29.7 |
指标要求(dBi) | 29.5 |
从上面的列表可以看出:天线增益能够满足指标要求。
5.1.3.5.2 第一幅瓣仿真结果
通过天线方向图仿真结果得到天线增益的同时可以得到第一幅瓣特性, 具体仿真结果见下表 3 所示。
表 3 第一幅瓣仿真结果
频段 项目 |
S 下行 |
第一副瓣(dB) | -16.5 |
从上面的仿真结果可以看出,天线的第一幅瓣能够满足技术指标要求。
5.1.3.5.3 天线噪声温度
天线噪声温度包括宇宙噪声,大气衰减和地面噪声、内部噪声温度,可 用下式计算:
Ta=Tsk/Lat+Tat+Tsl+2.7
Tsk 、Lat – 天线背景噪声温度(宇宙噪声) 和大气吸收衰耗; Tat – 大气噪声温度;
![]() sl – 旁瓣噪声;
sl – 旁瓣噪声;
系统本身还要产生内部噪声,馈源、天线表面等的热损耗将作为内部噪 声源产生天线噪声。设 La 为天线系统的输入功率与辐射功率之比,则换算
到接收机输入端的天线内部噪声温度为:

T0 为天线系统所处的环境温度,一般取 290K。
因此,换算到接收机输入端的整个天馈系统的噪声温度为:

天线噪声温度如下表 4 所示.
表 4 天线系统噪声温度预计表
项 目 | S 频段 |
大气衰减(K) | 23.0 |
宇宙背景噪声(K) | 2.7 |
绕射漏射噪声(K) | 60.0 |
馈源损耗(K) | 20.4 |
天线总噪声(K) | 106.1 |
指标要求(K) | 110.0 |
5.1.3.5.4 天线系统 G/T 值
结合天线增益和噪声温度,通过以下公式可以得出天线的 G/T 值: G/T=G-10lg(Ta+Tlna)
表 5 天线系统 G/T 值预算
分项 | 2.2GHz |
天线增益 | 29.7 |
天线噪温 | 106.1 |
场放噪温 | 60 |
系统 G/T 值(dB/K) | 7.49 |
指标要求(dB/K) | 7.0 |
从上面的结果可以看出系统 G/T 值能够满足技术指标要求。
5. 1.4 伺服部分
伺服分系统由天线座及有关控制、测量元件,天线控制单元,天线驱动 单元等组成,主要功能是以灵活的方式捕获目标,以最高优先级的工作模式 跟踪目标,确保天线准确对准目标并实时提供目标角度测量数据。
天线座采用方位—俯仰型结构,天线座上安装1.8m抛物面天线、S频段 馈源、摄像机和标校望远镜。天线运转时,方位360°无限,俯仰有电气限位 与机械限位保护措施,确保天线系统工作正常。
5.1.4.1 设计特点
a) 天线控制单元基于 CPCI 总线工控机设计,与遥测基带组合和监控 计算机配合,实现工作方式转换,工作方式包括: 自跟踪、综合跟 踪、数字引导、程序跟踪、记忆跟踪、搜索、手动跟踪、等待等多 种工作模式。
b) 伺服控制采用对速变输入量的快速最优控制,实现大失调角时快 速、平稳、无超调追赶调转。采用自适应 PID 控制器实现位置环的 二阶无静差数字系统,减小了动态滞后误差并实现了对等速输入目 标无稳态误差的跟踪。
c) 采用综合平滑滤波算法,进行目标测量模型的建模、数据融合,求 取残差平方和最小的目标视在角的最优估计值,实现低仰角平稳准 确跟踪。
d) 采用高性能的 IGBT 模块实现 PWM 功率放大器,体积小,重量轻, 并且具有良好的线性度和快速驱动能力。
e) 采用 RDC 轴角编码器和粗精组合的角传感器,分辨率为 16 位编 码。
f) 采用性能良好的宽调速小惯量稀土永磁直流伺服电动机为伺服分系
统的执行元件(测速机与电机同轴) 。
g) 天线座上的限速、限位等所有开关均采用光电隔离的接近开关,提 高了系统的抗干扰能力,并适应于要求三防措施的场合。
h) 天线座采用谐波传动,传动精度高,体积小。天线座采用低频汇流 环和高频旋转关节来传输电信号,实现方位 360°无限运转。
5.1.4.2 工作原理
系统采用单通道单脉冲自跟踪体制。天线接收目标发来的信号,经馈源 送到射频耦合网络和下变频器及遥测基带单元,最后将解调出的目标相对于 天线轴线的偏差信号 ―方位角误差和俯仰角误差送到伺服分系统。
伺服分系统将处理上述信号,根据选用的控制规律控制天线指向。在自 跟踪状态下,伺服分系统将根据设备的状态,利用遥测基带单元解调出的方 位角误差和俯仰角误差作误差控制信号,保证天线快速而平稳地向减小误差 的方向运动,从而达到跟踪目标的目的。同时,伺服分系统综合处理天线角 度编码信号和各种测量信号,送出天线测得的准确目标角度数据。
5.1.4.3 伺服环路设计
伺服分系统是由天线控制单元、天线驱动单元和天线座等组成的多环路 闭环系统。内环是电流环,由 PWM 功率放大器、电机、电流传感器及校正 电路组成; 外环是模拟速度环,由电流环、测速机及校正电路组成; 最外环 是以 NIOSⅡ微处理器控制为核心的数字位置环,在不同的工作方式下,数 字位置环的闭环路径是不一样的。
在手动、程控、数字引导、定点跟踪方式下,由模拟速度环、D/A 变 换模块、数字控制器、RDC 转换模块和测角旋变构成数字位置环。天线的运 行受相关工作方式下所给的指令角度控制,如在数字引导方式天线将按数字 引导角度运行,在程控方式天线将按理论弹道角度运行,在定点方式天线将 运行到定点角度位置。
在自跟踪方式下,由目标发射机、天线、馈源、信道、跟踪接收机、A /D 变换模块以及模拟速度环、D/A 变换模块、数字控制器构成数字位置 环。在自跟踪状态下,天线接收目标发来的信号,经馈源送到射频耦合分路 器和双流分集接收机,最后将解调出的目标相对于天线轴线的偏差信号 ― ― 方位角误差和俯仰角误差送到伺服分系统。伺服系统将根据设备的状态利用
方位角误差和俯仰角误差作误差控制信号,保证天线快速而平稳地向减小误 差的方向运动,从而达到跟踪目标的目的。
5.1.4.4 伺服功能设计
(1)跟踪功能
系统跟踪方式有:
自跟踪: 在接收机状态正常,信号锁定后可以从任意工作方式切换到自 跟踪方式,天线将自动跟踪目标。同时接收机解调误差电压和 AGC 电压在 工作窗口有光点显示。 目标信号消失后,可以从自跟踪方式切换到任意方 式。 自跟踪方式,方位和俯仰支路均可以选择单轴跟踪也可以是双轴同时跟 踪。可以选择具有低仰角跟踪算法的综合跟踪模式。
程序跟踪: 系统参数设置菜单提供了输入理论弹道( T ,A ,E) 的功
能,并且可以保存下来,在理论弹道有效情况下,可以进入程控工作方式。 一旦进入程控工作方式,天线首先运转到理论弹道起始点就位,等待 T0 键有 效,天线保持不动。在 T0 有效后,天线将按理论弹道运行。
手动跟踪:用单杆进行手动控制跟踪。
等待:在等待状态下,天线控制单元将关断天线驱动单元中 PWM 功率 放大器的使能端而维持 PWM 功率放大器的上电不变。用于在短时间内不运 行天线的一种等待方式。从等待状态可以切换到任意工作方式。
数字引导:通过网络与数据处理机相连传递信息,实现数字引导的功能。
记忆跟踪: 当目标进入过顶区域时,根据目标运行轨迹预测其经 t 时刻 后所处位置,直接驱动天线在预测位置重新捕获。记忆时间不少于 5 秒。
搜索: 可以执行自动搜索目标的功能。
单轴/双轴: 天线控制单元上电初始化为单轴状态,方位和俯仰支路是 分别操作的且可以工作于不同的工作方式下。按动 SINGLE/DUAL 键即双 轴状态,再按动一下又回到单轴状态。在双轴状态时,方位支路和俯仰支路 是同时操作的且同时处于相同的工作方式,操作时只需按动方位或俯仰一个 工作方式键即可。
(2)性能测试
性能自测试提供一个快速有效、准确地评估系统性能和维护系统的软件 工具,主要有:
阶跃响应测试(小、中、大) ,用于测试伺服系统数字位置环的过渡过 程特性,主要有超调量、调节时间、稳态误差、最大速度、最大加速度等技 术指标。
速度响应测试(低、高) ,用于测试伺服系统数字位置环的等速信号特 性。
正弦响应测试,用于测试伺服系统数字位置环的正弦信号特性,正弦信 号的幅度和频率由保精度最大速度与最大加速度确定。
自跟踪通道测试,用于测试伺服系统自跟踪环路的过渡过程特性。
保护装置测试,用于测试伺服系统的天线工作范围和限速限位角度。 (3)参数设置和维护
参数设置和维护可以进行如下项目: 程序弹道数据置入,天线零位修
正,指北修正,软件限速限位角,天线定点位置,站址坐标,俯仰自跟踪下 限位等。
(4)事后处理
对自跟踪数据进行统计分析和绘制误差曲线,计算跟踪精度。并且对记 录数据可查阅、打印。
5.1.4.5 伺服软件与人机界面设计
伺服分系统的计算机即天线控制器不仅仅是简单地完成跟踪环路的控制
算法计算,更多的是完成系统跟踪方式的智能化管理、对外通讯接口、各种 参数和状态的图形数据显示等等功能,而且操作手要实时进行操作,因此在 软件设计中,首先要针对各功能模块进行优化设计和编程。特别是要设计友 好的人机界面,方便操作手的观察和使用,要以简洁直观的图形数据提示操 作手快速做出决定,并且可以灵活方便地进行操作。
(1)软件功能模块
伺服和跟踪环路计算模块
轴角编码数据处理模块
操控智能管理模块
数据处理与前馈控制模块
事后数据处理模块
系统性能自测试
参数维护模块
(2)人机界面
系统人机界面友好,具有丰富的工作窗口和操控菜单。具有实时任务、 性能自测试、参数维护、事后处理等操控界面。
5. 1.5 天线座设计
天线座设计我们有两种成熟的设计方案供选择,分别如下:
5.1.5.1 方案一: 采用 A-E 天线座形式
天线座是支撑天线探测目标的装置,通过伺服控制系统,驱动天线准确 地在规定的运动范围内完成所需的运动。
天线座由支撑转动装置、动力驱动装置、轴位检测装置、滑环装置、安 全保护装置等组成,见图 12 。该天线座由专业化模块构成,体积小、重量 轻、精度高、刚度大、噪音低,工作可靠,易于操作和维护。

图 12 天线座及天线结构示意图
(1)方位底座
方位底座为圆柱形铸铝件,外径约Φ500mm 、高约 600mm 。上端面与俯 仰箱相联,下端面与过渡段相联; 中间隔层安装方位轴承、方位驱动装置、 方位轴,内腔中安装除湿装置。
(2)方位轴承
采用单排四点接触球式回转支承作为方位轴承,能同时承受轴向力、径 向力和倾翻力矩,承载能力大、对安装结构适应性强。
回转支承能够在零间隙和过盈状态下运转,回转精度很高。同类产品实
测: 方位轴铅垂误差≤15″(包括方位底座的调平残差)。
(3)俯仰支撑转动装置
俯仰支撑转动装置采用俯仰箱支撑叉臂的结构,轴向尺寸小、结构刚度
好,有利于高频部件的安装,有利于密封防护。
俯仰箱为高 450mm 的箱形结构铸铝件。俯仰驱动装置、缓冲器安装在 俯仰箱不同的侧壁上。俯仰轴为两根空心短钢轴,固联在俯仰箱左右外壁 上。轴内空腔为波导、电缆的通道。左右两叉臂为箱形结构铸铝件,通过圆 锥滚子轴承套装在俯仰轴上。上端面通过连接件与天线中心体相连,下端面 连接配重箱。
标校望远镜、锁定器及速率陀螺安装在左叉臂上,跟踪电视与跟踪电视 控制存储箱安装在右叉臂上。
(4)动力驱动装置
方位、俯仰均采用单链驱动。
方位末级大齿轮与回转支承的轴承座圈做成一体,结构紧凑、刚度大; 俯仰末级齿轮直接贴在叉臂上,连接刚度大、动力和运动的传递路径最短。 传动链中不包括弹性薄弱环节(如: 俯仰轴、方位轴) ,显著增加了传动链 的刚度。
采用行星齿轮减速器作为方位、俯仰动力驱动装置的主要执行元件。优 点有: 精度高(回差小于 1′) 、刚度大、效率高、超载能力强、体积小、 重量轻、噪音低(≤60dB(A))。
(5)轴位检测装置
套轴式旋转变压器直接套装在方位、俯仰轴上,回转运动的传递路径直
接,可以保证方位、俯仰轴位数据真实、可靠。
(6)安全保护装置
在天线俯仰工作范围之外,设置位置可调的感应块和非接触式微动开
关,实现限速和电气限位。在俯仰箱前后立面设置两对俯仰缓冲器。设置锁
定器。收藏时,锁定销插入相应锁定孔中,将俯仰锁定。
5.1.5.2 方案二: 采用 X-Y 天线座
(1)天线结构设计
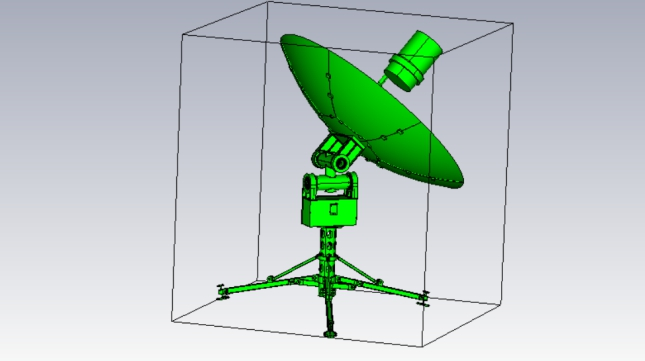
天线结构子系统由天线反射体和天线座两大部分组成。天线反射体部分 主要包括主反射面板、支撑机构。天线座主要包括 X-Y 天线座、驱动系统、 轴角检测装置、安全保护装置和附属设施。天线结构子系统模型简图如图 13 所示。天线面拼装采用定位销加卡扣设计,实现快速拼装并满足使用要求, 此结构 X-Y 座架,控制模块和三脚架之间采用定位销加螺钉连接,实现拆装 快捷,并且满足安装后整机工作精度。此结构特点为: 拆装方便快捷,实现 快速机动化; 整体重量轻便,适合两人配合操作; 模块化设计,装配后整机 精度高。

图 13 天线工作模型图
(2)天线反射体结构
天线采用标准抛物面天线。天线反射体结构由以下几个主要部分组成: 主反射面板,支撑调整机构等。
便携功能实现方案: 天馈部分模块化设计,天馈部分为馈源、馈源支撑调 整机构、天线主反射面三部分,各部分通过定位销和防脱螺母组合使用设计 使其通过快速安装成为一个模块。天馈部分模型如图14 。

图 14 天馈部分示意图
(3)天线主反射面
主反射面由二圈面板组成,共 7 块面板,其中内圈面板 1 块,外圈面板
6 块。面板采用碳纤维制成,单块面板精度较高,拼装后重复定位精度高。

图 15 外圈面板组装模型示意图

图 16 单块面板模型示意图
便携功能实现方案: 天线面组装使用销钉定位加防脱螺钉组合使用的
设计,和天线面内预埋快插式定位销卡扣结构件的设计使天馈部分实现快速
重构并且复装精度达到使用要求。

图 17 面板组装实物图

图 18 快速定位卡扣实物图
(4)天线座结构
天线座采用 X-Y 结构型式。天线座和驱动控制盒一体化设计,天线座架
轮廓尺寸为: 450mm(长)X450mm(宽)X1050mm(高),X 轴 Y 轴末级均传动采用 RV 减速机,轴承选用标准自位向心轴承。这种天线座结构形式具有以下优 点:
![]() 结构紧凑,有很好的抗倾覆能力和结构稳定性。
结构紧凑,有很好的抗倾覆能力和结构稳定性。
![]() X 轴,Y 轴末级传动速比大,折算惯量和传动误差小。
X 轴,Y 轴末级传动速比大,折算惯量和传动误差小。
![]() X 轴 Y 轴采用正交支套结构,末级传动 RV 减速机传动的结构形式,
X 轴 Y 轴采用正交支套结构,末级传动 RV 减速机传动的结构形式,
其体积小,重量轻,输出力矩大,精度高等特点。
![]() 高精度 RV 减速机齿隙很小,甚至可以做到零背隙,因而回差也小,
高精度 RV 减速机齿隙很小,甚至可以做到零背隙,因而回差也小,
减小了天线过顶时由于偏心力矩的方向改变而导致的天线晃动量,保证天线
系统的跟踪性能。
![]() 轴承采用标准自位轴承,转动灵活,易于调整,减少了加工误差对
轴承采用标准自位轴承,转动灵活,易于调整,减少了加工误差对
转动的影响。






